
Engineers at Harvard developed a robot hand that has pneumatic tentacles instead of fingers
Its main advantage is that it requires no special sensors or programming to gently lift fragile objects
In context: Engineers often model robots after humans. Even the robotic arms in a car manufacturing plant bear a passing resemblance to their human counterpart. The main difference usually comes down to the hand.
To continue the assembly line example, robotic arms are typically fitted with whatever is needed for that section of the line. It could be a wielder or a large pincer for gripping a door. Claws and robotic hands with fingers are great for picking up things like a box, a cup, or a car door. What they suck at is lifting soft or irregularly shaped objects such as a plant or fragile glass tube. These tasks require special programming, precise maneuvering, and special sensors for human-based hands.
Thinking outside the box, engineers at Harvard’s John A. Paulson School of Engineering and Applied Sciences (SEAS) developed a “dumb” robotic hand that can easily pick up such objects. To tackle the problem, the researchers looked to another animal kingdom member — the jellyfish.
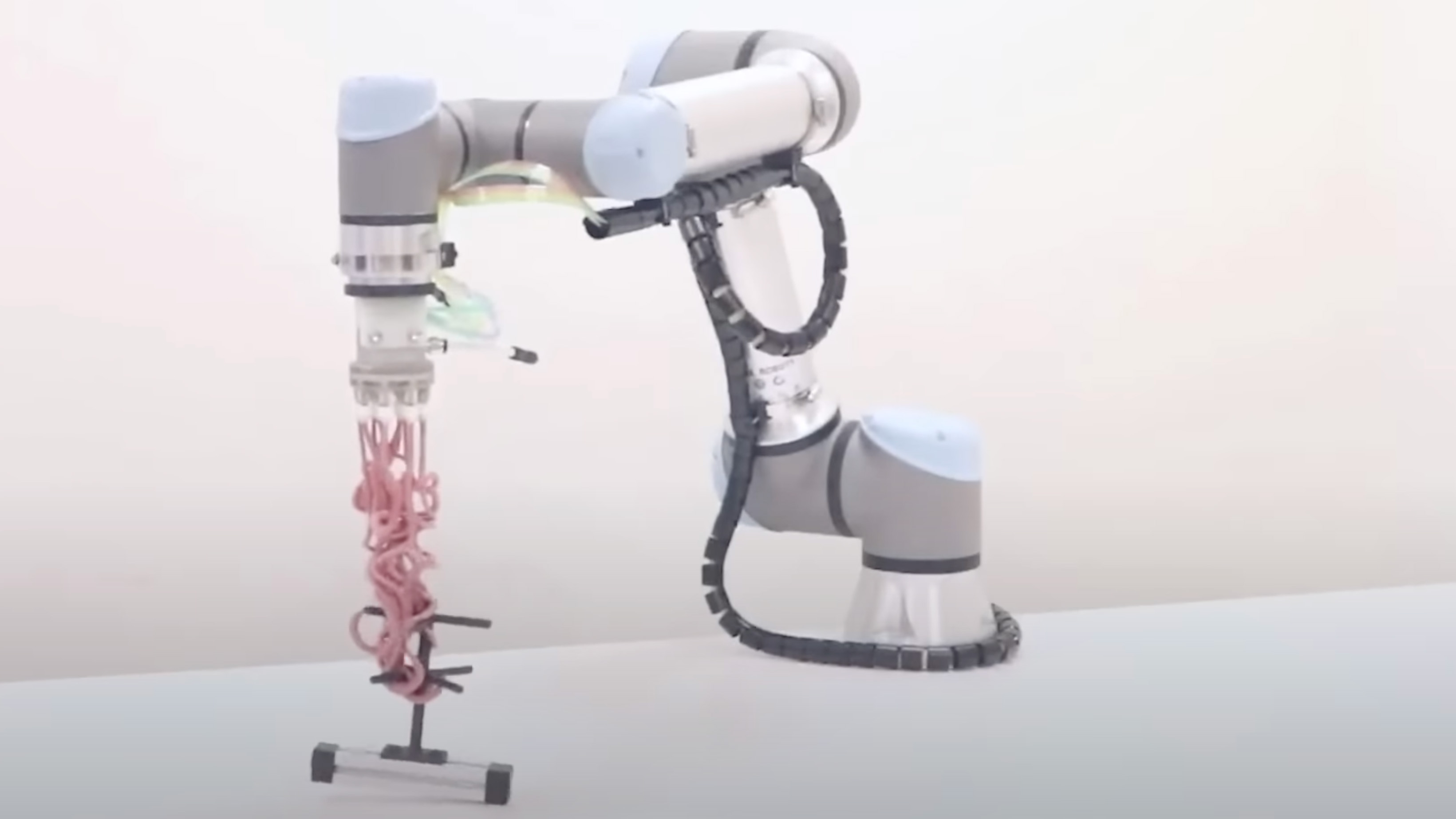
Instead of fingers or claws, the “tentacle robot” can grip and lift objects by snaring them in long pneumatic rubber tubes called filaments. The filaments dangle freely from a wrist-like joint. An operator or a simple computer algorithm can maneuver the device over an object, so the tentacles drape around it.

When the filaments are actuated, they contract, gently entangling and lifting the target, similar to how a jellyfish catches its prey. When the tubes relax, the object is lowered and released.
The tentacle hand needs many filaments to work, explained SEAS Professor of Applied Mathematics L. Mahadevan. A few are too weak, while more can lift even heavy objects. The important thing is that it does not require any specialized programming or sensors as other hands do.
“Entanglement enables each highly compliant filament to conform locally with a target object leading to a secure but gentle topological grasp that is relatively independent of the details of the nature of the contact,” Mahadevan said.
The researchers envision several practical applications for the device in fields ranging from agriculture to warehouse management. Earlier this month, the team published the study and technical details in the Proceedings of the National Academy of Sciences academic journal. You can view examples of the tentacle robot in action in the masthead video.
Source: https://www.techspot.com/news/96460-engineers-harvard-developed-robot-hand-has-pneumatic-tentacles.html#:~:text=Instead%20of%20fingers%20or%20claws,from%20a%20wrist%2Dlike%20joint.

